
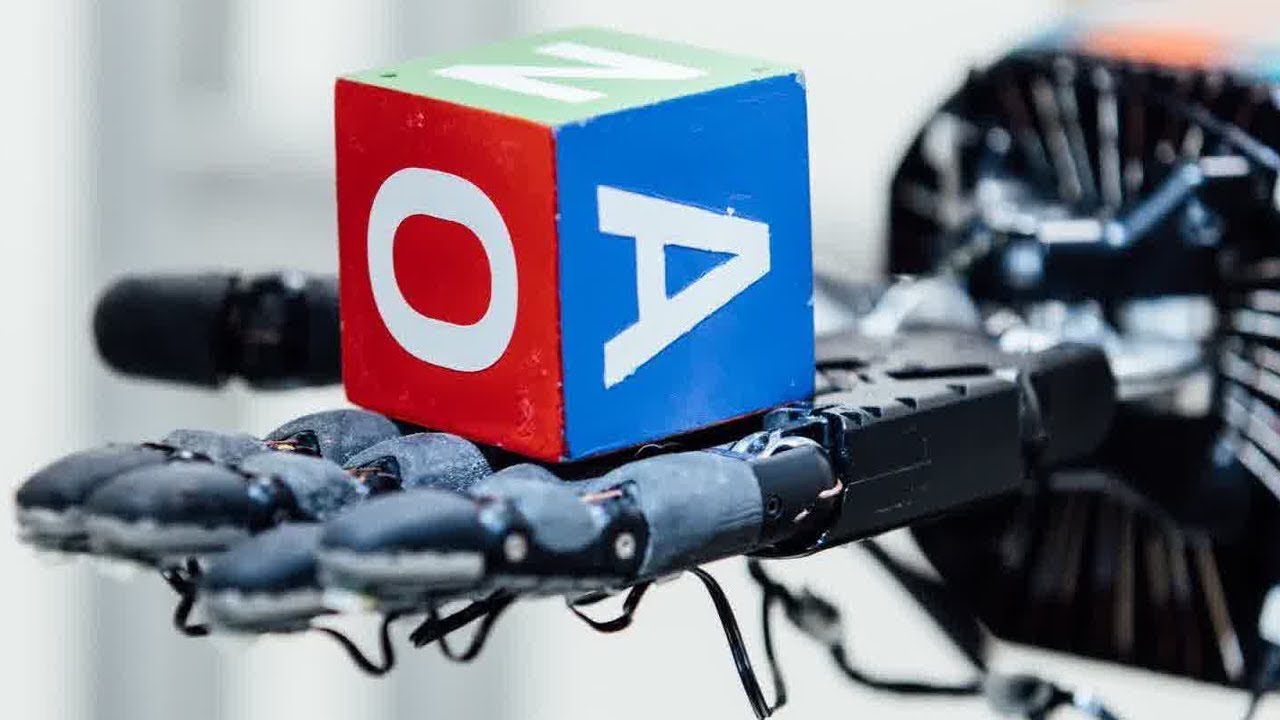
OpenAI has trained a human-like robot hand to manipulate physical objects with unprecedented dexterity. Their system, called Dactyl, is trained entirely in simulation and transfers its knowledge to reality, adapting to real-world physics. Dactyl learns from scratch using the same general-purpose reinforcement learning algorithm and code as OpenAI Five. The results show that it?s possible to train agents in simulation and have them solve real-world tasks, without physically-accurate modeling of the world.
Restored attachments:
